?
Multi axle 3D Models
Find the best Multi axle 3D Models, free download in STL, FBX, GLB, OBJ, 3MF, USDZ for 3D modeling and creation in Blender, 3D printing, game developing, animation, eCommerce, AR/VR and etc. Generated by Tripo AI 3D Generator.
You May Also Like :
Engineering Part 3D Model

Industrial Grinder 3D Model

Tilt Window Frame 3D Model

Metal Frame 3D Model

Machined Part 3D Model
Four-prong Hub 3D Model

工业机械臂3d模型 3D Model

Robotic Joint 3D Model
Industrial Conveyor 3D Model

Three-armed Joint 3D Model
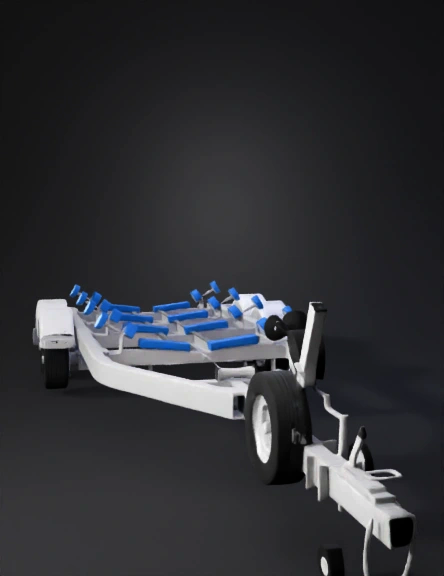
Multi-axle Trailer 3D Model

Mechanical Spider 3D Model

3d Printer Chassis 3D Model

Tactical Multitool 3D Model
Mechanical Blade Components 3D Model
Cross Pipe Fitting 3D Model

Precision Linear Stage 3D Model

Orange Mining Truck 3D Model