3D Workspace
Home
Assets
Affiliate Program
Sign up/Log in
?
Upgrade
DCC Bridge
Anonymous1765120482
12-13 06:22
Model Name
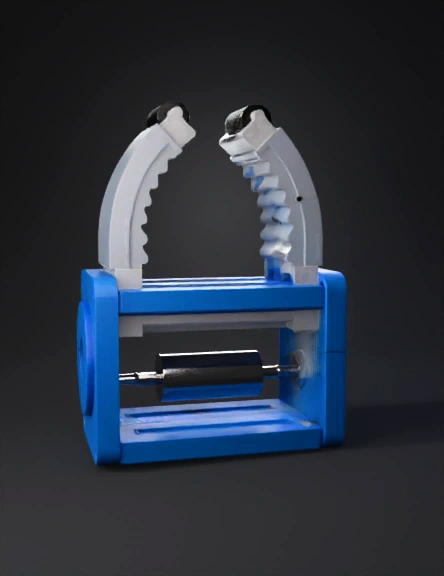
3d printed gripper mechanism
Tags
3d printing
3d printing realistic
machine
machine 3d printing
machine 3d printing realistic
machine realistic
mechanical looking
plating
plexiglass
plier
realistic
sliding mechanism
Prompt
柔性物料防缠绕夹爪(适配布料 / 线缆) 整体功能 抓取柔性物料(布料、数据线缆),避免缠绕 / 拉扯,适配物流分拣 / 电子装配线。 全零件精细描述 夹爪主体:PLA 3D 打印,尺寸 50mm×40mm×25mm,背部 Φ20mm 机械臂接口(带 2 个 M3 定位孔),内部设 2 个直线导轨(槽宽 4mm,长度 30mm); 柔性夹爪指:2 个,硅胶材质(邵氏 30A),长度 40mm× 宽度 10mm× 厚度 3mm,内侧做波浪形凹槽(槽深 2mm,间距 5mm),根部嵌入 PLA 骨架(与导轨滑动配合); 驱动组件:微型气缸(缸径 16mm,行程 20mm,固定在主体内部),气缸活塞杆通过鱼眼接头(M5 螺纹)连接夹爪指; 辅助部件:夹爪指顶部设 1 个微型滚轮(Φ8mm,橡胶材质),减少与柔性物料的摩擦力。 创新点 波浪形硅胶夹爪 + 顶部滚轮:双重防缠绕,抓取线缆时不会勾住绝缘层; 柔性材质 + 气缸缓冲:夹持力可调节(0.5-5N),避免拉扯布料 / 线缆; 3D 打印主体:结构简单,成本比工业柔性夹爪低 70%,易改装。帮我生成Solidwork立体图
Detailed Info
Related Models
Enter invite code
Enter invite code to get credits!